
Планетоход — транспортное средство, приспособленное для работы на поверхности планет и других небесных тел в различных климатических условиях при гравитации, отличной от земной.
В качестве транспортных средств, доставляющих планетоходы к месту работы, используются космические корабли.
К конструкции планетохода предъявляются следующие требования: высокая стойкость к вибрационным, ударным и линейным перегрузкам, по мере необходимости оборудование планетохода устройствами конвертирования ходовой части и спуска на поверхность исследуемого небесного тела. Планетоходы разрабатывались для проведения новых экспериментов уже на поверхности планет Солнечной системы, к тому же изучение некоторых небесных тел довольно трудно проводить с помощью орбитальных аппаратов либо вообще невозможно. Ярким примером может послужить непрозрачная атмосфера Венеры.
Главным источником, дающим хоть какие-то сведения о поверхности Венеры, являются радиолокационные методы. Задачи, которые предстоит решать аппаратам, во многом схожи с задачами орбитальных исследовательских станций. Это получение, обработка информации о поверхности планеты, ее недрах и условиях окружающей среды и последующая передача результатов на Землю.
Наиболее эффективными могут считаться необитаемые планетоходы с автоматическим или дистанционным управлением, либо для выполнения специальных исследовательских программ обитаемые планетоходы, которые должны снабжаться специальной герметичной кабиной, позволяющей создать нормальные климатические условия, пригодные для работы человека в течение длительного времени.
Основным преимуществом необитаемых планетоходов является отсутствие опасности для человеческого организма на начальных стадиях исследования планет. Очень важным в конструкции планетохода является выбор типа движителя, которым будет оснащаться планетоход.
Из всех типов движителей большим вниманием пользуются колесное и гусеничное исполнение движителя. Колесные планетоходы, в свою очередь, имеют небольшое преимущество перед гусеничными. Они могут использоваться в более широком диапазоне грунтов, обеспечивают возможность создания тягового усилия и в ведущем, и в тормозном режиме работы, имеют более высокий КПД за счет возможности
регулировать электроприводом режимы работы и добиваться большей эффективности и, кроме всего перечисленного, имеют большую проходимость и увеличенный срок службы.
Гусеничные имеют большее преимущество при использовании в условиях слабонесущих грунтов: высокий запас силы тяги на слабонесущих грунтах и более низкое удельное давление на поверхность.
Родоначальником направления шагающих движителей является П. Л. Чебышев с его стопоходящей машиной. Для этого класса движителей характерны такие недостатки, как отсутствие управления высотой машины, отсутствие возможности выбора точки опоры. В поисках наиболее эффективного варианта многие конструкторы создавали гибридные образцы. Попытки сочетать в одном механизме принципы качения и шагания привели к созданию американской фирмой «Вагнер» опытного образца колесно-шагающего движителя типа Годевиль. Колеса, установленные на продольных рычагах подвески, могли поворачиваться на 360°. При вращении рычагов корпус агрегата описывает траекторию движения рычага. Другой разновидностью является движитель типа Падивагон. Движитель представляет собой четыре трех-катковых колеса. В первом режиме колеса находятся в заторможенном режиме, и перемещение происходит за счет вращения катков. Шагающий режим реализуется заторможенностью катков, и вращающиеся колеса реализуют шагание аппарата. Громоздкость — вот основной недостаток движителя такого типа.
В зависимости от несущего элемента планетоходы делятся на рамные и планетоходы с кузовом в качестве несущего элемента. Применение рамного планетохода оправданно, если необходимо снизить металлоемкость конструкции или упростить ее. Кузовное исполнение можно использовать при создании планетохода с герметичной кабиной или крупным контейнером.
Одной из сложнейших технических проблем является обеспечение электроэнергией планетохода в течение длительной космической экспедиции. В настоящее время в космических аппаратах используются следующие источники энергии: аккумуляторные и солнечные батареи, их комбинации и радиоизото-пные термоэлектрические генераторы. Неотъемлемой частью любого планетохода является система управления движением, которая предназначена для изменения положений аппарата, находящегося в условиях неупорядоченной внешней среды.
Эта система должна выполнять функции по сбору внешней информации, ее дальнейшей оценки и после выработки решения выдать команды на исполнение решения. Системы управления делятся на интерактивные (человек участвует в работе системы управления) и автономные. Первые, в свою очередь, подразделяются на дистанционные, программные и автоматизированные, которые работают при непосредственном контроле человека. Автономные делятся на программные, работающие по типовым программам, оптимальные и адаптивные.
Более целесообразно применять комплекс, включающий в себя несколько различных систем управления. Например, наличие дистанционной системы управления, которая реализует управление аппаратом по радиоканалу дальней связи, пригодится в случае неполадок автоматической системы управления.
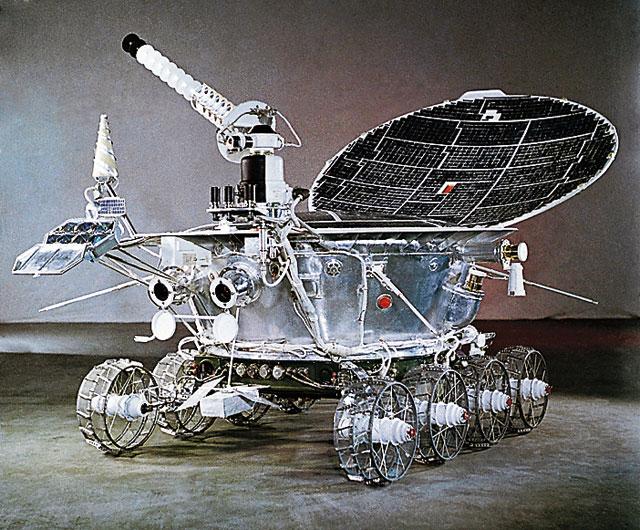
Первым представителем исследовательских планетоходов явился «Луноход-1» (см. также «Луноход»).