Вероятностное прогнозирование процесса изменения ТС сводится к установлению закона распределения параметра, характеризующего ТС, и к вычислению вероятности выхода или невыхода прогнозируемого процесса за установленные пределы в будущем.
Вероятностное прогнозирование применяют в тех случаях, когда изменение контролируемого параметра e(t) ТС достаточно сложно.
В процессе эксплуатации РЭО и СА вероятностное прогнозирование может быть реализовано в том случае, если будет организован контроль вероятности безотказной работы P(t) и других характеристик надёжности одного или группы однотипных объектов за определённый период Tn.
где r - количество периодов контроля; промежуток времени между очередным контролем.
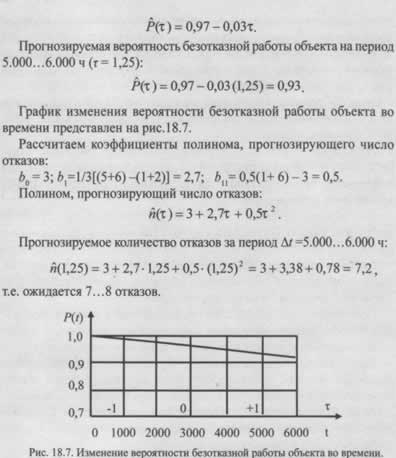
Для каждого периода вычисляются значения вероятности безотказной работы P(t1), P(t2) и т.д.
Полученный ряд описывается аналитически (например, многочленом или квадратичным полиномом).
Для вероятностного прогнозирования из k контролируемых параметров выбирается один обобщённый параметр, учитывающий изменение всех параметров.
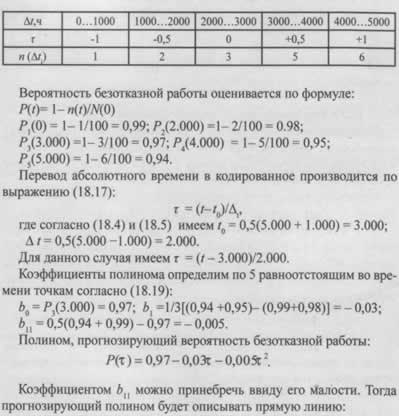
Пример. В процессе эксплуатации проводилось наблюдение за 100 объектами и учитывалось количество их отказов n: