
Комбинационный метод.
При задании модели системы с учетом ее структуры необходимое количество контролируемых параметров может быть сокращено из-за наличия последовательных, параллельных и встречнопараллельных (обратных) связей между элементами и группами элементов, наличия разветвленных выходов элементов, а также вследствие того, что вероятность одиночных дефектов в системе больше вероятности кратных (одновременных) дефектов. В системах, в которых взаимосвязаны функциональные элементы, как правило, используется комбинационный метод диагностирования. Поиск дефекта проводят путем измерения определенной совокупности контролируемых параметров и на основе анализа данных измерений делают заключение о дефектном элементе.
Неисправный элемент на основе функциональной модели определяется путем анализа матрицы (таблицы) функций неисправностей.
При использовании комбинационного метода для реализации процедуры диагностики вывод о состоянии объекта диагностики делают после получения информации обо всей совокупности диагностических параметров.
Последовательный метод.
При использовании этого метода поиска дефекта информация о состоянии элементов анализируется поочередно по каждому элементу. Последовательный метод может быть реализован с помощью жесткой или гибкой программы. Жесткая программа предусматривает неизменную последовательность анализа, при использовании гибкой программы поиска порядок каждой последующей проверки зависит от результатов предыдущей проверки.
При истинных значениях внешних входов уравнения функциональных связей имеют вид:
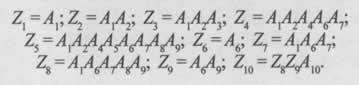
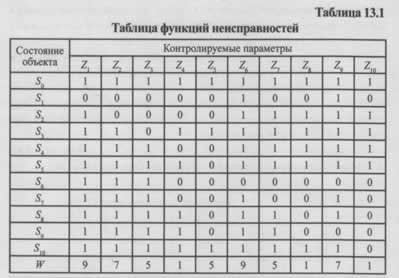
Полная матрица одиночных дефектов, приводящих к отказам как отдельных элементов, так и данной системы в целом, приведена в табл. 13.1. Каждая строка таблицы представляет собой двоичный код состояния системы при отказе соответствующего элемента. Двоичные коды строк не совпадают друг с другом, т. е. все одиночные отказы различимы на полном наборе выходных параметров.
Построим матрицу, количество строк которой оставалось бы прежним, а количество столбцов, определяющих количество контролируемых параметров, было бы сведено к минимуму, обеспечивающему различные коды во всех строках.
В минимизированную совокупность параметров войдут, очевидно, все выходные параметры системы и все параметры, соответствующие неразветвленным выходам элементов (выходы элементов 3, 5, 10 и 4 на рис. 13.13). Контроль таких параметров необходим для поиска дефектов в каждом блоке.

Составим минимизированную таблицу функций неисправностей (МТФН) системы, включив в нее только неразветвленные выходы (табл. 13.2). Если все строки новой матрицы будут иметь различающиеся коды, то с ее помощью возможно распознавание одиночных дефектов системы, а параметры неразветвляющихся выходов образуют искомую минимизированную совокупность.
Если это условие не соблюдается, то такую укороченную матрицу следует дополнить минимально необходимым количеством выходов так, чтобы все строки различались.
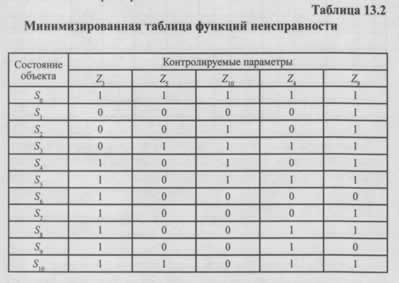
В табл. 13.2 не различаются 6-й и 7-й, 8-й и 9-й дефектные элементы.
С помощью полной матрицы (см. табл. 13.1) устанавливаем, что нужно дополнить укороченную матрицу выходом Z9 для различения этих элементов. Тогда минимизированной совокупностью диагностических параметров для поиска дефектов системы, состоящей из десяти функциональных элементов, будут пять параметров: Z3, Z4, Z5, Z9, Z 10.
Минимизированная совокупность диагностических параметров получена для одиночных дефектов объекта. При появлении кратных (одновременных) дефектов матрица одиночных дефектов может быть использована для их обнаружения, но при этом необходимо учитывать ряд особенностей.
Предположим, что система проверки, построенная на минимизированной совокупности параметров, реализует режим последовательного поиска по гибкой программе, т. е. выбор последующего контролируемого параметра зависит от результата проверки предыдущего параметра. Тогда при одновременном отказе нескольких дефектных взаимосвязанных функциональных элементов система проверки зафиксирует один из них. Устранив дефект этого элемента, снова включают систему и обнаруживают второй дефектный элемент и т. д. Например, при одновременных отказах взаимосвязанных элементов А1 и А5 код состояния объекта (см. табл. 13.2) будет совпадать с кодом неисправности A1 так как при кратных дефектах системы двоичные коды соответствующих строк логически поразрядно перемножаются.
В данном случае 00001- код неисправности А1, 10111- код неисправности А5, 00001- код кратного дефекта, совпадающий с кодом неисправности блока А1.
Следовательно, первоначально находится дефектный элемент А1, затем элемент А5. Аналогичный процесс будет наблюдаться при отказах элементов 1 и 2, 1 и 3, 1 и 4, 1 и 7, 1 и 8, 1 и 10.
Если отказ произойдет одновременно в элементах 1 и 6, то двоичный код будет состоять из 00000. Такого кода нет ни в одной строке МТФН. Следовательно, система проверки укажет на наличие неопознанного дефекта.
При одновременном отказе элементов 5 и 10 появится ложный код 10011. В этом случае система проверки ошибочно укажет на дефект элемента 8.
К обнаруживаемым одновременным дефектам относятся такие, код которых совпадает с кодом одного из одиночных дефектов (например, 1 и 5). Обнаружение других одновременных дефектов взаимно независимых элементов возможно путем анализа кодов одиночных дефектов и их произведений.
При наличии в диагностируемой системе обратных связей (ОС): -объединяют элементы с обратной связью в один общий функциональный элемент и таким образом модель системы с ОС приводят к модели системы без ОС, при этом дефекты объединенных элементов не различаются;
- на время поиска дефектов разрывают цепи ОС с помощью специальных коммутационных устройств.
Для определения минимальной совокупности параметров контроля работоспособности объекта диагностики достаточно найти такое сочетание параметров, произведение столбцов которых равнялось бы нулю. Такими параметрами являются Z3, Z5, Z10. В данном случае это выходные параметры системы. Следует заметить, что коды неисправностей выходных элементов содержат только один ноль. Поэтому строки в таблице функций неисправностей с одним нулем указывают на выходные элементы, а соответствующие параметры, которые являются единственными для обнаружения неисправностей этих элементов, будут выходными параметрами системы.
Один из наиболее распространенных последовательных методов оценки состояния системы, учитывающих ее структуру, - метод половинного разбиения. Он основан на предположении о равнозначности отказов, что эквивалентно предположению об основной, или последовательной, схеме соединений.
Рассмотрим систему из N последовательно соединенных элементов. Задача поиска неисправного элемента в данном случае заключается в нахождении такой последовательности проверок, при которой на поиск дефекта затрачивается минимум времени. Оптимизация программы поиска дефекта состоит в том, что при первом шаге вся цепочка элементов разбивается на две части так, чтобы с вероятностью 0,5 неисправный элемент находился левее или правее некоторой контрольной точки. В этой точке осуществляется контроль состояния левой или правой цепочки элементов. Наличие или отсутствие сигнала определяет направление последующего деления на отрезки одной или другой половины цепочки (с равными значениями вероятностей указанных отрезков цепи элементов).
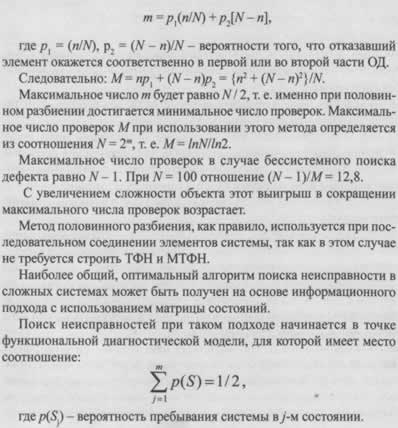
При контроле системы, состоящей из N элементов с одинаковой вероятностью отказа, каждая проверка разделяет объект диагностики на две части c n и (N-n) числом элементов.
Среднее число элементов в той части, где окажется отказавший элемент (левее и правее точки деления), равно:
При необходимости данный алгоритм может быть построен с учетом стоимости диагностирования, под которой понимаются затраты любого рода, в том числе и временные.
Наиболее компактно алгоритм поиска неисправностей может быть представлен в виде дерева логических возможностей (ДЛВ) (рис. 13.15).


Алгоритм поиска неисправности, построенный по МТФН, имеет свои достоинства и недостатки. Достоинством алгоритма является использование минимального количества ДП, а следовательно, и минимальное количество проводов, связывающих объект и ТСД и минимальное количество преобразователей и нормализаторов, преобразующих физические величины, снимаемые с ОД, к одному пределу изменения напряжения постоянного тока 1-10 В.
Недостаток такого алгоритма проявляется в случае появления двух и более неисправностей, при которых оператор может получить неверную информацию об объекте при появлении ложного кода. Решить эту проблему можно путём построения алгоритма по полной ТФН.
Особенность построения такого алгоритма заключается в том, что диагностические параметры не повторяются в ветвях ДЛВ в отличие от первого алгоритма.
Рассмотрим построение алгоритма на примере схемы, представленной на рис. 13.13. Исходной информацией для построения алгоритма является полная матрица одиночных дефектов ТФН (табл. 13.1)
Из таблицы видно, что минимальные значения функции предпочтения имеют параметры Z4, Z8 и Z10. В данном случае выбираем выходной параметр Z10 как наиболее доступный при его определении. Этот параметр делит всё множество состояний на два почти равных подмножества: Z10 = 0 и Z10 = 1.
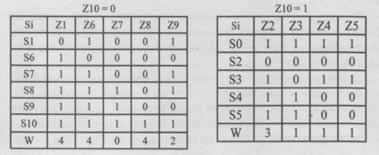
При ZIO = 0 минимальное значение (W = 0) имеет пара Z7. Следовательно, следующая проверка параметра Z7.
При Z10= 1, при равных значениях W = 1, следующей проверкой будет проверка одного из выходных параметров Z3 или Z5. Оба параметра являются выходными параметрами системы. Проверяем параметр Z3. Фукция предпочтения W = 1 и т. д. Алгоритм поиска неисправности в виде дерева по ТФН представлен на рис.13.16.
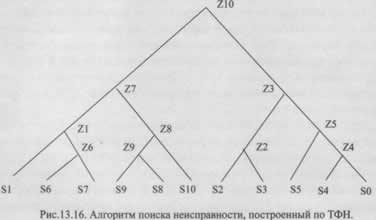
Среднее количество проверок на одну неисправность 3,5.
В нашем случае оно одинаково с алгоритмом, построенным по МТФН, но в общем случае средние количества на одну неисправность, построенные по ТФН и МТФН, могут отличаться друг от друга на небольшую величину.
Сочетание комбинационного и последовательного методов диагностирования.
Вследствие ограниченной доступности к элементам РЭО и АС проверка промежуточных диагностических параметров объекта осуществляется либо только с-помощью выходных параметров, либо путем рационального сочетания выходных и внутренних параметров. При рациональном планировании поиска сначала проверяют выходные параметры ОД и только после этого переходят к проверке внутренних параметров. При этом на первом этапе используется комбинационный метод реализации процедуры диагностирования (обработка производится после ввода информации о совокупности выходных параметров), на втором
- последовательный метод, реализуемый по гибкой программе, при которой порядок каждой последующей проверки внутреннего параметра зависит от результатов предыдущей. Схема поиска неисправностей по гибкой программе строится в зависимости от состояния выходных параметров. Такое планирование поиска дефектов существенно сокращает количество проверок и время восстановления системы.
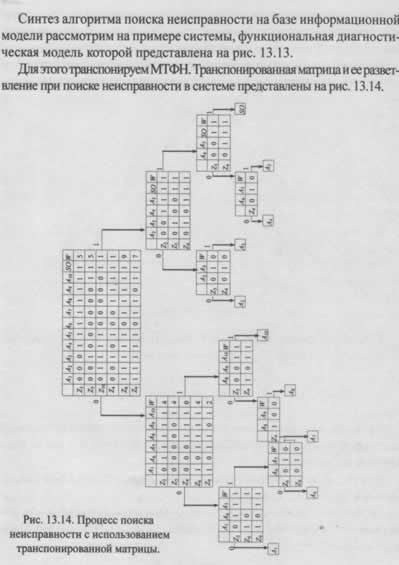
Использование сочетания комбинационного и последовательного методов рассмотрим на примере диагностирования системы, функциональная схема которой приведена на рис. 13.13.
Система имеет три выходных параметра Z3, Z5 и Z10. Если составить матрицу функций неисправностей только по выходным параметрам, то каждая строка такой матрицы будет представлять собой код неисправности функционального элемента, если код не повторяется, или группу элементов, если код повторяется в строках МТФН (см. табл. 13.2).
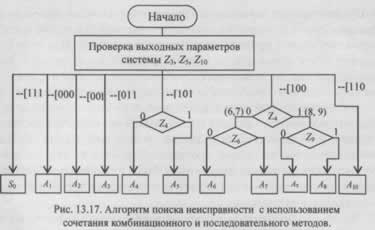
Таким образом, с помощью контроля выходных параметров системы комбинационным методом удается определить место отказа с точностью до группы элементов. Для диагностирования системы с точностью до функционального элемента, как правило, требуется выполнить дополнительные проверки внутренних параметров системы. Их количество должно быть минимальным, что достигается выбором на каждом шаге такого параметра, которому соответствует минимальное значение функции предпочтения Wi. В этом случае используется последовательный метод. Алгоритм поиска дефекта описанным способом представлен на рис. 13.17.
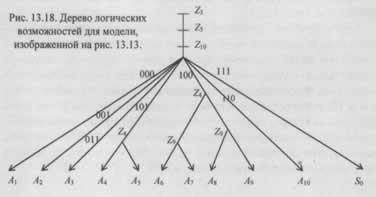
Дерево логических возможностей при сочетании комбинационного (по выходным параметрам) и последовательного (по внутренним параметрам) методов поиска неисправности представлено на рис. 13.18.
Из рисунка видно, что для поиска неисправного элемента в рассматриваемой системе требуется не более двух проверок внутренних параметров, количество диагностируемых параметров также минимальное.
Среднее количество проверок на поиск одной неисправности составляет
В общем случае количество проверок внутренних параметров, необходимое для диагностирования системы с точностью до функционального элемента, зависит от структуры системы и количества выходных параметров. Чем больше выходных параметров системы и более разветвленная (дивергирующая) структура, тем меньше потребуется внутренних проверок при одинаковом числе элементов в системе.