

После долгого отсутствия я возвращаюсь, чтобы рассказать об одном опасном аэродинамическом явлении, которое в эпоху первых реактивных истребителей могло поставить пилота в практически безвыходную ситуацию. Представьте себя за штурвалом. Вы спокойно летите, никого не трогаете, и, например, ремонтируете печку «Примус». Для набора высоты вы, как обычно, добавляете тягу двигателю и слегка берёте штурвал на себя. Сначала всё идёт по плану, но через несколько минут ручка управления самопроизвольно, с огромной силой, уходит от вас в крайнее положение «на себя» и замирает там. Поздравляю, вы столкнулись с явлением «сверхкомпенсации руля высоты». У вас есть считанные минуты, чтобы приземлиться, пока самолёт, игнорируя ваши усилия, продолжает задирать нос. Давайте разберёмся, почему это происходит.
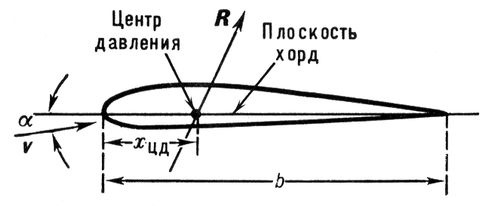
Диаграмма, иллюстрирующая положение центра давления на профиле крыла.
Ключевые понятия: центр давления и шарнирный момент
Чтобы понять суть явления, нужно разобраться с двумя базовыми понятиями. Первое — центр давления. Если просто, это точка на крыле или руле, где условно «приложена» равнодействующая всех аэродинамических сил. Важно, что эта точка не фиксирована — она может смещаться в зависимости от скорости полёта и угла атаки самолёта.
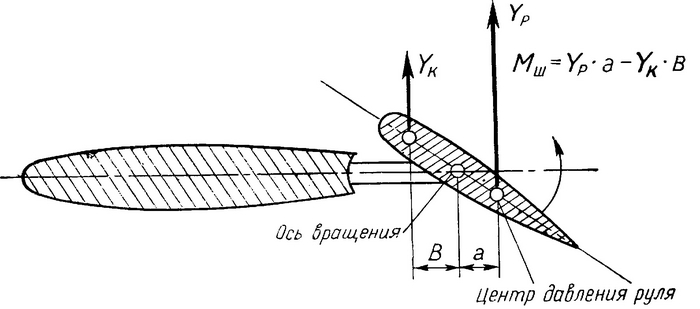
Второе, не менее важное понятие — шарнирный момент. Это момент силы, создаваемый аэродинамикой на руле (например, руле высоты) относительно его оси вращения. Обычно этот момент стремится вернуть руль в нейтральное, прямое положение. Он возникает из-за того, что центр давления и ось вращения руля не совпадают. Чем больше скорость и угол отклонения руля, тем сильнее этот момент. Если это пока сложно представить, не переживайте — дальше будут схемы, которые всё прояснят.
Схема, демонстрирующая принцип работы непослушной системы управления.
Эволюция управления: от мускульной силы к гидравлике
На заре авиации самолёты были лёгкими и тихоходными. Шарнирный момент был невелик, и пилот мог управлять рулями напрямую, силой своих рук и ног, через систему тросов и тяг. Однако с ростом скоростей и размеров самолётов силы на рулях стали запредельными. Никакой пилот-тяжелоатлет уже не мог с ними справиться. На смену прямым механическим связям пришли бустеры (гидроусилители), а затем и полноценная электронная система управления (fly-by-wire).
Обратите внимание: 10 рандомных понятий из психологии, которые тебе могут пригодиться.
Но и здесь возникла дилемма. Мощность гидропривода, необходимого для работы на сверхзвуковых скоростях, росла, а вместе с ней — его вес и размеры. Получался замкнутый круг: мощный привод делал самолёт тяжелее и менее манёвренным, а слабый привод не справлялся с нагрузкой, что вынуждало ограничивать скорость. Нужно было принципиально иное решение.
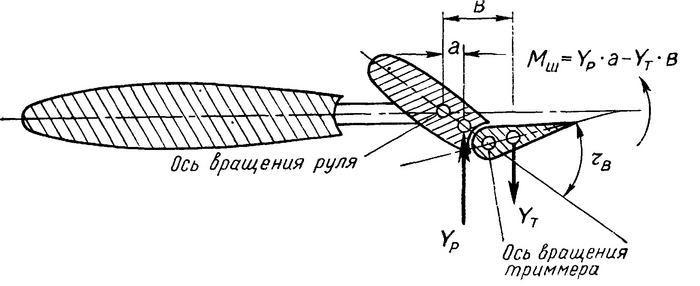
Схема, поясняющая принцип компенсации шарнирного момента с помощью триммера (разновидность сервокомпенсации).
Инженерные хитрости: как обмануть аэродинамику
Инженеры нашли выход, изобретя несколько способов компенсации шарнирного момента. Их цель — уменьшить или вовсе свести на нет усилие, которое пилоту нужно прикладывать к штурвалу. Основные методы:
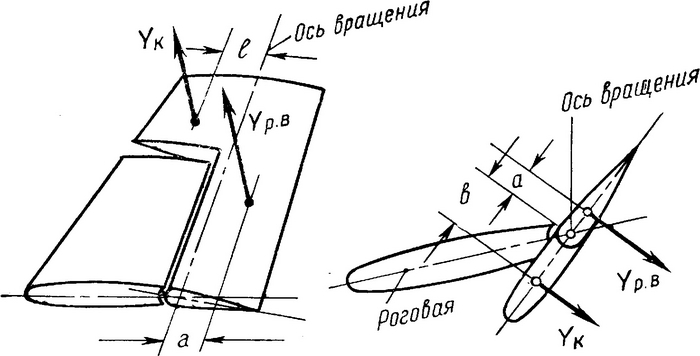
- Осевая компенсация: Ось вращения руля смещается так, что часть его площади остаётся перед этой осью. При отклонении эта передняя часть создаёт момент, противоположный основному. Метод прост и аэродинамически эффективен.
- Рупорная компенсация: Похожа на осевую, но перед осью вращения оставляют небольшую площадку особой формы, напоминающую рупор. Реализация проста, но на больших углах ухудшает аэродинамику.
- Внутренняя компенсация: Чаще используется в элеронах. В полости у оси вращения создаётся перепад давления с помощью гибкой диафрагмы, который и создаёт компенсирующий момент. Хорошо подходит для сверхзвука, но ограничивает ход руля.
- Сервокомпенсация и триммеры: На задней кромке основного руля устанавливается небольшая дополнительная управляемая поверхность — сервокомпенсатор. Триммер — её частный случай, используемый для полного снятия усилий в установившемся полёте.
Роковая ошибка: когда компенсация становится сверхкомпенсацией
И вот мы подходим к главной опасности, связанной, в частности, с осевой компенсацией. Если в полёте из-за изменения режима (скорости, угла атаки) центр давления смещается на компенсирующую часть руля, происходит катастрофический сбой. Шарнирный момент не просто обнуляется — он меняет знак на противоположный! Теперь аэродинамические силы не возвращают руль в нейтраль, а, наоборот, стремятся отклонить его до упора.
Для пилота это выглядит так: ручка вырывается из рук и уходит в крайнее положение. Чтобы вернуть её, нужно приложить усилие в обратную, непривычную сторону (не тянуть, а толкать). В этой стрессовой ситуации, пока пилот пытается осознать происходящее, самолёт может выйти на критические углы атаки и сорваться в штопор. Это и есть явление сверхкомпенсации.
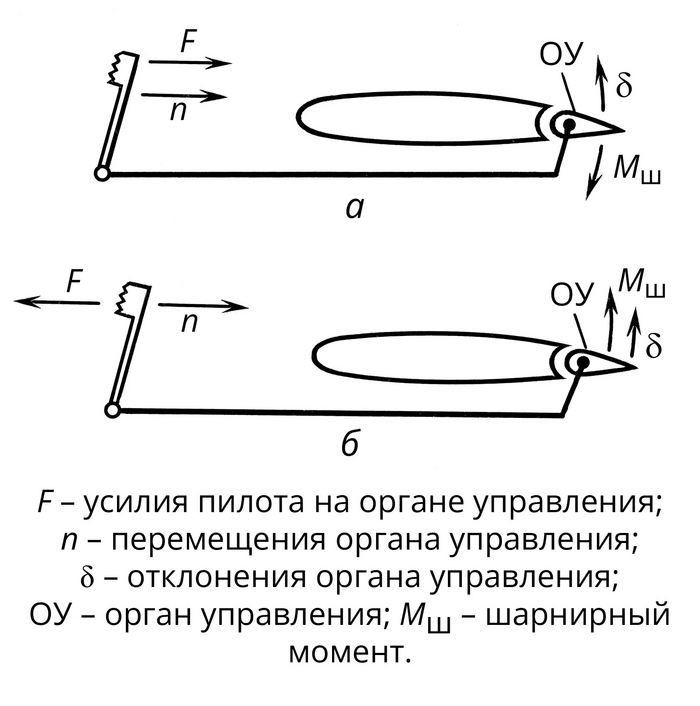
Принципиальная схема сил: (а) нормальный руль, (б) руль в состоянии сверхкомпенсации. Видно, что момент меняет направление.
Борьба с явлением в разных конструкциях
Сверхкомпенсация — крайне опасное явление, и конструкторы борются с ним всеми силами. Существуют разные подходы. Например, на некоторых самолётах Сухого устанавливают настолько мощные приводы, что они способны физически «пересилить» момент даже в случае сверхкомпенсации. Другие конструкторы, как в случае с некоторыми самолётами МиГ, идут на компромисс: допускают лёгкую сверхкомпенсацию на малых скоростях (где её проще преодолеть), но проектируют руль так, чтобы на высоких скоростях он работал в нормальном, безопасном режиме. Это позволяет использовать более лёгкие приводы. В идеале сверхкомпенсации нужно избегать полностью, но в реальности проектирование истребителя — это всегда поиск баланса между безопасностью, весом и эффективностью.
Надеюсь, теперь вы понимаете, в какой сложной ситуации мог оказаться пилот первого поколения реактивных машин и почему порой казалось, что «самолёт принял решение приземлиться» самостоятельно. Удачи при посадке!
Подпишитесь, чтобы не пропустить новые интересные публикации!
Автор статьи - Лиза Градышева
Больше интересных статей здесь: Новости науки и техники.
Источник статьи: Самолёт принял решение приземлиться.