

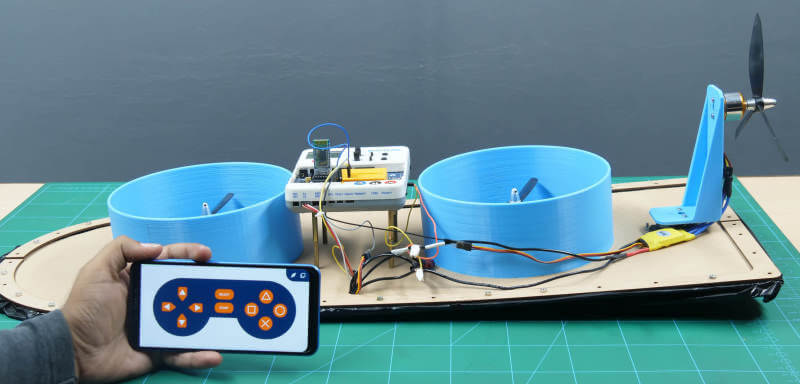
Представляем вашему вниманию увлекательный проект по созданию электрического судна на воздушной подушке с дистанционным управлением через смартфон. Это устройство сочетает в себе свойства планера и транспортного средства, способного скользить по поверхности. В данном руководстве мы подробно разберем, как самостоятельно собрать подобную конструкцию в домашних условиях, используя доступные компоненты и специальное программное обеспечение. Для программирования "мозга" устройства — платы evive — мы будем использовать визуальную среду PictoBlox, а для управления с мобильного телефона — интуитивно понятное приложение Dabble. Скачайте необходимые программы и присоединяйтесь к творческому процессу!
Шаг 1: Подготовка материалов и инструментов

Для успешной сборки вам потребуется следующий набор компонентов и инструментов:
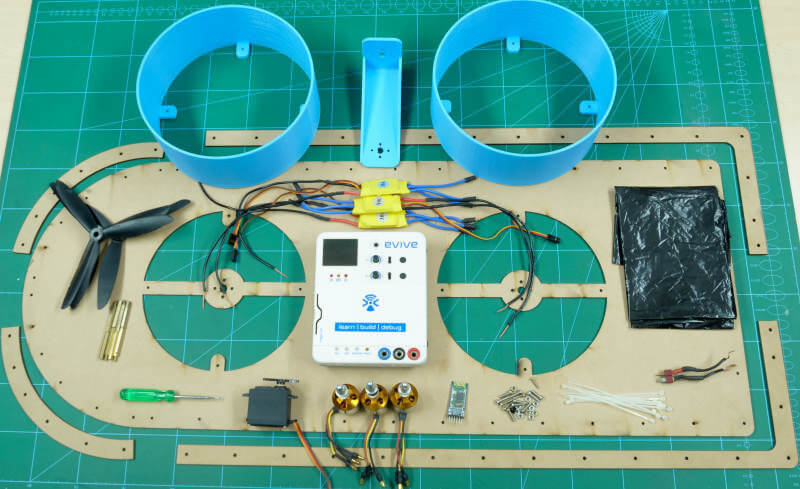
Электронные компоненты и детали:
- Контроллер evive (основная плата управления)
- Модуль беспроводной связи Bluetooth HC-05
- Три бесколлекторных двигателя (БДПТ) A2212/13T 1000KV: два для подъема и один для тяги
- Три электронных регулятора скорости (ЭРС) Simonk на 30А
- Три трехлопастных пропеллера диаметром 177.8 мм
- Металлический сервопривод для рулевого управления
- Литий-полимерный аккумулятор 3S 2200mAh
- Набор соединительных проводов и перемычек
- Крепеж: болты и гайки M3 различной длины
Конструкционные материалы:
- Прочный полиэтиленовый пакет или пленка для создания воздушной подушки
- Кабельные стяжки для фиксации компонентов
- Листы МДФ, вырезанные по чертежам (основа платформы)
- Детали, напечатанные на 3D-принтере (корпуса двигателей, элементы крепления)
- Двусторонний скотч и изолента
- Стойки-спейсеры для плат высотой 25 мм
Программное обеспечение:
- PictoBlox (графическая среда программирования)
- Мобильное приложение Dabble (для управления с телефона)
Шаг 2: Изучение конструкции и чертежей
Конструкция судна состоит из комбинации деталей из МДФ и 3D-печатных элементов. Чертежи и файлы для печати можно найти в приложенных материалах. Ключевыми элементами являются:
- Платформа (E): Несущее основание, на котором монтируются все компоненты. Она должна быть одновременно прочной и легкой.
- Боковые пластины (A, B, C, D): Удерживают воздушную подушку по периметру.
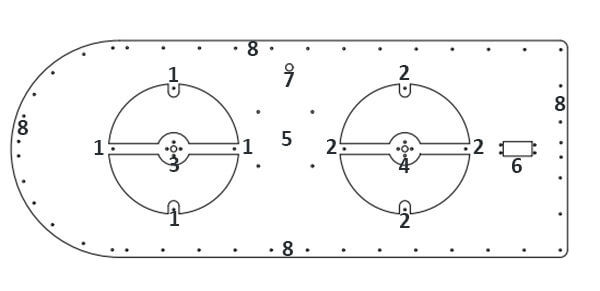
На платформе предусмотрены специальные отверстия и места для крепления:
- Позиции 1 и 2: для установки корпусов подъемных двигателей.
- Позиции 3 и 4: для крепления самих двигателей.
- Позиция 5: для монтажа контроллера evive.
- Позиция 6: для установки сервопривода рулевого управления.
- Отверстие 7: для пропуска силовых и сигнальных проводов.
- Область 8: для фиксации краев воздушной подушки.
Шаг 3: Основные компоненты: БДПТ и ЭРС
Перед сборкой важно понять принцип работы ключевых элементов.
Бесколлекторный двигатель постоянного тока (БДПТ) — это мотор без щеток, что обеспечивает ему высокую надежность, большое отношение мощности к весу и высокие обороты. Именно эти качества делают его идеальным для создания подъемной силы.
Электронный регулятор скорости (ЭРС) — это устройство, которое управляет скоростью вращения БДПТ, регулируя подаваемую на него мощность. Он получает сигнал от контроллера и преобразует его в соответствующие команды для двигателя.
Шаг 4: Сборка базовой платформы
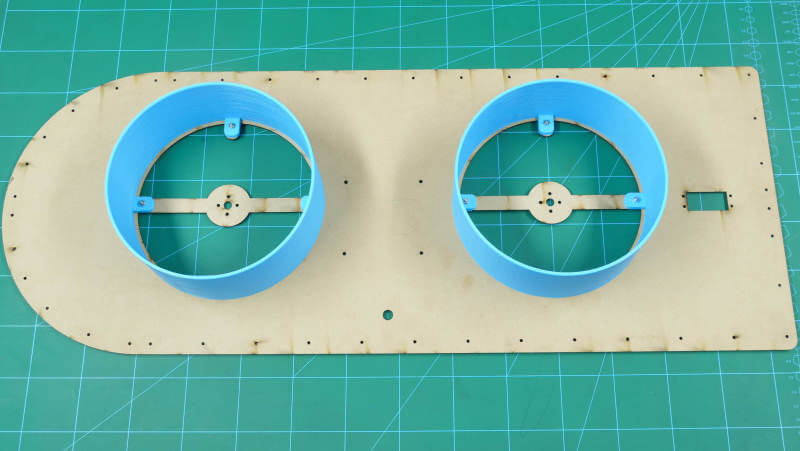
Начните с крепления 3D-печатных корпусов для подъемных двигателей в позициях 1 и 2 на платформе, используя болты М3. Эти корпуса будут направлять воздушный поток вниз. Затем установите "мозг" проекта — плату evive. Для этого используйте стойки-спейсеры, чтобы приподнять плату над поверхностью и закрепите ее в позиции 5. Центральное расположение evive способствует правильной балансировке всего аппарата.
Шаг 5: Установка подъемных двигателей
Закрепите два БДПТ в позициях 3 и 4. Подключите каждый двигатель к своему электронному регулятору скорости (ЭРС). После подключения аккуратно зафиксируйте сами регуляторы скорости под платформой с помощью кабельных стяжек, чтобы они не болтались.
Шаг 6: Монтаж системы рулевого управления
Для маневрирования судну необходима система поворота. В ее основе — металлический сервопривод. Важное примечание: перед установкой необходимо откалибровать сервопривод, установив его в нейтральное положение (90 градусов). Это можно сделать, подключив его к evive и используя встроенное меню управления сервоприводами. После калибровки закрепите сервопривод в отверстии 6. К его валу с помощью саморезов прикрепите 4-сторонний рычаг, который будет соединен с рулевым механизмом.
Шаг 7: Установка тягового двигателя
Третий БДПТ отвечает за движение судна вперед. Его нужно закрепить на специальном кронштейне, который является частью рулевого механизма. Используйте болты М3 для надежной фиксации двигателя.
Шаг 8: Электрические подключения
Аккуратно пропустите все провода от двигателей и сервопривода через отверстие 7 на платформе для подключения к evive. Выполните соединения в следующем порядке:
- Плюсовой провод от аккумулятора LiPo подключите к красным силовым проводам всех трех ЭРС.
- Минусовой провод от аккумулятора подключите к черным силовым проводам всех ЭРС.
- Соедините три провода от каждого подъемного и тягового двигателя с тремя выходными проводами соответствующего ЭРС.
- Подключите сервопривод руля к порту S1 на evive.
- Сигнальные провода (обычно белый или желтый) от ЭРС подъемных двигателей подключите к цифровому пину 2 на evive.
- Сигнальный провод от ЭРС тягового двигателя подключите к цифровому пину 3.
- Для питания самой платы evive используйте провода VCC и GND от одного из ЭРС, подключив их к контактам VIN и GND на evive соответственно.
- Наконец, подключите модуль Bluetooth HC-05 к специальному разъему на evive для беспроводной связи.
Шаг 9: Установка пропеллеров
На валы всех трех бесколлекторных двигателей наденьте и надежно закрепите трехлопастные пропеллеры. Убедитесь, что они зафиксированы строго и не имеют люфта.
Шаг 10: Создание воздушной подушки
Воздушная подушка — это герметичный "мешок" под платформой, который удерживает нагнетаемый воздух и создает подъемную силу. Используйте большой лист прочного полиэтилена, размер которого немного превышает размер платформы. Приклейте его края к нижней части платформы с помощью двустороннего скотча. Для окончательной фиксации просверлите отверстия в пленке по периметру и зажмите ее между платформой и верхними фиксирующими пластинами (A, B, C, D) с помощью болтов и гаек М3.
Шаг 11: Подключение питания
Заключительный этап сборки — подключение источника энергии. Используйте мощный литий-полимерный аккумулятор 3S, подключив его к соответствующему разъему на плате evive, как было указано в шаге с подключениями. Это обеспечит необходимую энергию для работы всех двигателей.
Шаг 12: Проверка и регулировка
Перед первым запуском критически важно проверить направление вращения всех пропеллеров. Подъемные двигатели должны нагнетать воздух вниз (в подушку), а тяговый двигатель — отбрасывать воздух назад. Если какой-либо двигатель вращается в обратную сторону, необходимо поменять местами любые два из трех проводов, соединяющих этот БДПТ с его ЭРС. Это изменит направление вращения на противоположное.
Шаг 13: Принцип работы и управление
Принцип действия судна прост: контроллер evive, получая питание от аккумулятора, управляет двигателями. Подъемные двигатели, нагнетая воздух в подушку, создают область повышенного давления, которая приподнимает всю конструкцию над поверхностью, уменьшая трение. Тяговый двигатель, отбрасывая воздух назад, создает реактивную силу, толкающую судно вперед. Сервопривод, поворачивая весь узел с тяговым двигателем, изменяет направление движения.
Управление осуществляется со смартфона через приложение Dabble по Bluetooth:
- Откройте Dabble и подключитесь к модулю HC-05.
- Выберите режим "Геймпад".
- Кнопка START — запуск/остановка подъемных двигателей (взлет/посадка).
- Кнопка UP — запуск тягового двигателя (движение вперед).
- Кнопки LEFT/RIGHT — поворот рулевого механизма (маневрирование).
Шаг 14: Программирование в PictoBlox
Для программирования логики управления используйте визуальную среду PictoBlox. Основной скрипт будет выполнять следующие функции:
Инициализация соединения с Dabble и настройка ЭРС.
Блок управления подъемными двигателями по команде кнопки START.
Блок управления тяговым двигателем по команде кнопки UP.
Блоки управления сервоприводом руля по командам кнопок LEFT и RIGHT.
Шаг 15: Альтернативное программирование на Arduino
Для опытных пользователей доступна также возможность запрограммировать контроллер evive, написав код на языке Arduino IDE. Готовый скетч можно найти в архиве проекта.
Шаг 16: Запуск и заключение
Поздравляем! Ваше собственное управляемое со смартфона судно на воздушной подушке готово к испытаниям. Осталось лишь отдать команду через приложение Dabble, и уникальное транспортное средство плавно взмоет над поверхностью. Этот проект — отличный пример сочетания инженерии, программирования и творчества.
Материал подготовлен для сайта https://modelist-konstruktor.com/