
Условия работоспособности и диагностика САУ
Любая система автоматического управления (САУ) представляет собой комплекс конечного числа элементов. Соответственно, в ней может возникнуть лишь ограниченное количество возможных неисправностей. Ключевым для анализа является разделение всех возможных состояний системы на два подмножества: работоспособные и неработоспособные. Это разделение определяется так называемым условием работоспособности — набором требований, при выполнении которых объект способен корректно выполнять свои функции.
Стоит отметить, что понятие «работоспособность» не является абсолютно четким. Между состоянием полной исправности и полной неработоспособности существует спектр промежуточных состояний. В них система может функционировать, но с ухудшенными характеристиками и пониженным качеством работы. Таким образом, объект может пребывать в одном из состояний конечного множества S = (S₀, S₁, S₂, ... Sᵢ ... Sₙ), каждому из которых соответствует определенное значение диагностического признака.
При оценке работоспособности обычно исходят из следующих предпосылок: определена совокупность диагностических признаков, а допустимые отклонения от номинальных (исправных) состояний ограничены нижними и верхними границами. Для диагностики непрерывных объектов используются их параметры и характеристики. Чаще всего на диагностические параметры накладываются двухсторонние ограничения вида Zmin < Z < Zmax.
Основные требования к судовым системам управления
Качество функционирования любой САУ оценивается по степени выполнения основных задач, для которых она предназначена. Согласно нормативам Морского Регистра, к судовым системам управления предъявляются три фундаментальных требования:
- Устойчивость — способность системы возвращаться в состояние равновесия после прекращения внешнего воздействия.
- Точность в установившемся режиме — минимальное отклонение управляемой величины от заданного значения в статическом состоянии.
- Качество переходных процессов — характеристики поведения системы при переходе из одного установившегося состояния в другое.
Для того чтобы система считалась работоспособной, она должна быть, прежде всего, устойчивой (гарантировать затухание переходного процесса) и обладать требуемыми показателями качества. В инженерной практике применяются прямые и косвенные методы исследования этих показателей.
Прямые методы оценки качества
Если показатели качества определяются непосредственно по кривой переходного процесса, полученной в результате моделирования или натурного эксперимента, то такие оценки называются прямыми.
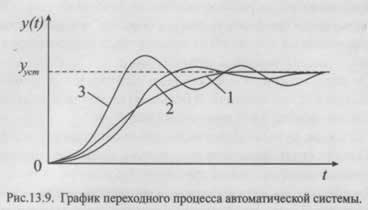
Для упрощения анализа переходные процессы в системах управления обычно рассматривают при типовых воздействиях. Часто в качестве возмущающего воздействия выбирают ступенчатую функцию, так как она представляет собой один из самых неблагоприятных и при этом легко реализуемых видов возмущения. В зависимости от динамических свойств системы, переходные процессы при ступенчатом воздействии делят на три типа:
- Монотонные (кривая 1 на рисунке): первая производная управляемой величины не меняет знак.
- Апериодические (кривая 2): знак первой производной меняется не более одного раза.
- Колебательные (кривая 3): знак первой производной меняется несколько раз.
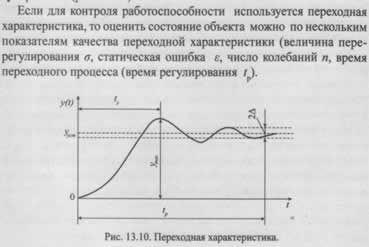
Рассмотрим определение прямых оценок на примере статической системы управления. Основными показателями, характеризующими поведение системы в переходном режиме, являются:
- Максимальное отклонение управляемой величины (Δymax).
- Перерегулирование (σ) — относительное максимальное отклонение.
- Время регулирования (tp) — время, за которое отклонение входит в заданный допуск.
- Число колебаний управляемой величины за время регулирования.
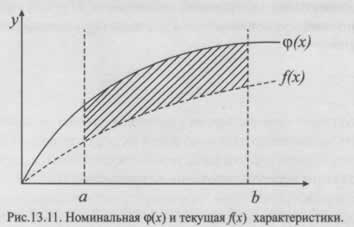
Для интегральной оценки всего переходного процесса часто применяют линейный интегральный критерий, например, интеграл от абсолютного значения ошибки (IAE). Его недостатком является одинаковая чувствительность как к величине отклонения, так и к его длительности. Однако он прост для реализации аппаратно (с помощью выпрямителя и интегратора на операционном усилителе). При его использовании важно четко фиксировать время окончания переходного процесса.
На практике также широко используется критерий среднеквадратичного отклонения (интеграл от квадрата ошибки, ISE). Этот критерий более чувствителен именно к величине отклонения, чем к длительности интервала.
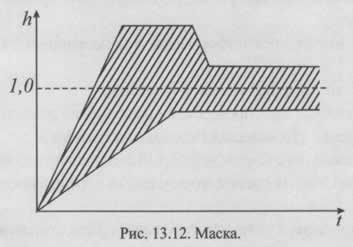
Допустимые границы для всего переходного процесса, учитывающие скорость нарастания, перерегулирование и время регулирования, могут быть заданы в виде специальной маски (допустимой области), накладываемой на график процесса.
Косвенные методы оценки качества
Суть косвенных методов заключается в том, чтобы оценить основные показатели качества системы без непосредственного построения кривой переходного процесса. Для этого используются частотные характеристики системы, такие как амплитудно-частотная (АЧХ) и вещественная частотная (ВЧХ) характеристики. По их виду (запасам по фазе и амплитуде, частоте среза) можно косвенно судить о перерегулировании, времени регулирования и устойчивости.
Косвенные методы, как правило, применяются на предварительных этапах анализа и синтеза системы для её грубой настройки. Прямые же методы, дающие наиболее полную и наглядную картину, используются для окончательной проверки качества функционирования системы, в том числе и в процессе её диагностирования.