

Почему стоит делать аппаратуру самому?
В эпоху, когда магазины предлагают огромный выбор готовых радиоуправляемых моделей и компонентов, может показаться, что создание собственной аппаратуры — лишняя трата времени. Однако у самодельных систем есть ряд неоспоримых преимуществ. Они легко ремонтируются, их можно модифицировать под новые задачи, и они не требуют постоянной переделки под обновленные стандарты, как это часто бывает с покупной техникой. Кроме того, самодельная система менее уязвима для злоумышленников, поскольку стандартные средства радиоэлектронного подавления рассчитаны на коммерческие образцы. Также было бы идеально создать систему, способную работать с любым каналом связи — радио, индукционным, инфракрасным или даже проводным, без внесения изменений в шифратор и дешифратор.
Выбор типа системы
Все системы радиоуправления можно разделить на три основные группы: аналоговые с тональным кодированием, простейшие цифровые (чаще всего числоимпульсные) на микросхемах общего применения и цифровые на специализированных больших интегральных схемах (БИС).
Простые цифровые системы, которые ранее активно описывались в литературе, включая публикации А.А. Проскурина, имеют недостаточную устойчивость к помехам. Они требуют четкой передачи логических уровней, а реализация эффективных алгоритмов защиты на простой логике невозможна. Простые же алгоритмы обычно лишь переводят систему в режим «Стоп» при помехах, к тому же для их реализации требуется много микросхем, что ухудшает массогабаритные показатели.
Современные специализированные БИС позволяют реализовать сложные алгоритмы кодирования и защиты от помех. Однако в этом случае моделист становится полностью зависимым от производителя микросхем. Представьте ситуацию: через несколько лет вам понадобится отремонтировать аппаратуру или построить вторую модель под тот же пульт, а нужная микросхема уже снята с производства как устаревшая. Придется полностью переделывать систему под новый стандарт. Кроме того, пользователь не может повлиять на ключевые параметры аппаратуры: состав команд, напряжение питания и т.д.
Таким образом, наиболее перспективным вариантом является аналоговая система. Для полноценного управления большинством моделей достаточно двух-трех пропорциональных каналов, что как раз могут обеспечить тональные аналоговые системы. В них нет понятия синхронизации, которая часто срывается помехами. Любой, даже обрывочный сигнал, информативен и будет правильно интерпретирован. Элементная база таких систем — транзисторы и операционные усилители — останется актуальной и через десятилетия, обеспечивая долгосрочную ремонтопригодность.
Конструктивные решения системы «Каната»
Базовый двухканальный вариант системы получил название «Каната», продолжая традицию именовать разработки в честь героев аниме.
Тип фильтра
В классических схемах тонального кодирования часто используются LC-контуры на ферритовых кольцах. Это трудоемкие, хрупкие и нестабильные элементы, чувствительные к температуре, старению и подмагничиванию. Гораздо лучшие и стабильные характеристики можно получить на активных RC-фильтрах, даже на одном транзисторе (например, КТ3102), не говоря уже об операционных усилителях.
Тип ключевого элемента
Хотя применение электромагнитных реле кажется очевидным из-за полного разрыва цепи и гальванической развязки, у них есть серьезные недостатки. Токи срабатывания и отпускания различаются, что при нечетком сигнале или изменении напряжения питания может привести к «залипанию» или несрабатыванию. Большинство реле рассчитано на 12 В и выше, а в модельных системах питание обычно 9 В. Низковольтные реле имеют высокий ток срабатывания, соизмеримый с током нагрузки. Кроме того, реле не позволяют плавно регулировать напряжение, например, для управления ходовыми моторами. Поэтому в системе используются мощные транзисторы.
Принцип действия
Рис. 1 Временная диаграмма
В каждом канале работают два генератора тональных частот, которые передаются на модель попеременно. Соотношение времени передачи этих частот и определяет положение рулей модели. Например, если в канале время передачи частот f2 и f3 одинаково, рули находятся в нейтральном положении. Если же f4 передается дольше, чем f5, рули второго канала отклонены.
Частоты в каждом канале переключаются с частотой 100-200 Гц в течение 35 мс, после чего передается информация о следующем канале. В отличие от цифровых систем, здесь не требуется точного соблюдения частот переключения или определенного порядка передачи. Фильтрам в дешифраторе все равно, в какой момент принять свою частоту. В каждый момент времени передается только одна частота, что исключает появление комбинационных частот и повышает помехоустойчивость. Наличие автоматической регулировки усиления (АРУ) стабилизирует амплитуду сигнала, делая систему нетребовательной к качеству канала связи.
Используемые частоты в базовом двухканальном варианте:
| № частоты | Частота, кГц | Назначение |
| 1 | 1 | Дополнит. дискретная команда |
| 2 | 1,6 | Пропорциональный канал А |
| 3 | 2,9 | |
| 4 | 3,6 | Пропорциональный канал В |
| 5 | 4,3 | |
| 6 | 5,2 | Пропорциональный канал С |
| 7 | 6,3 |
Бортовая аппаратура питается от двуполярного источника напряжением 3,5…4,5 В в каждом плече. Можно использовать литий-ионные, литий-полимерные аккумуляторы или две батареи из трех Ni-MH элементов.
Модуль дешифратора ДР4
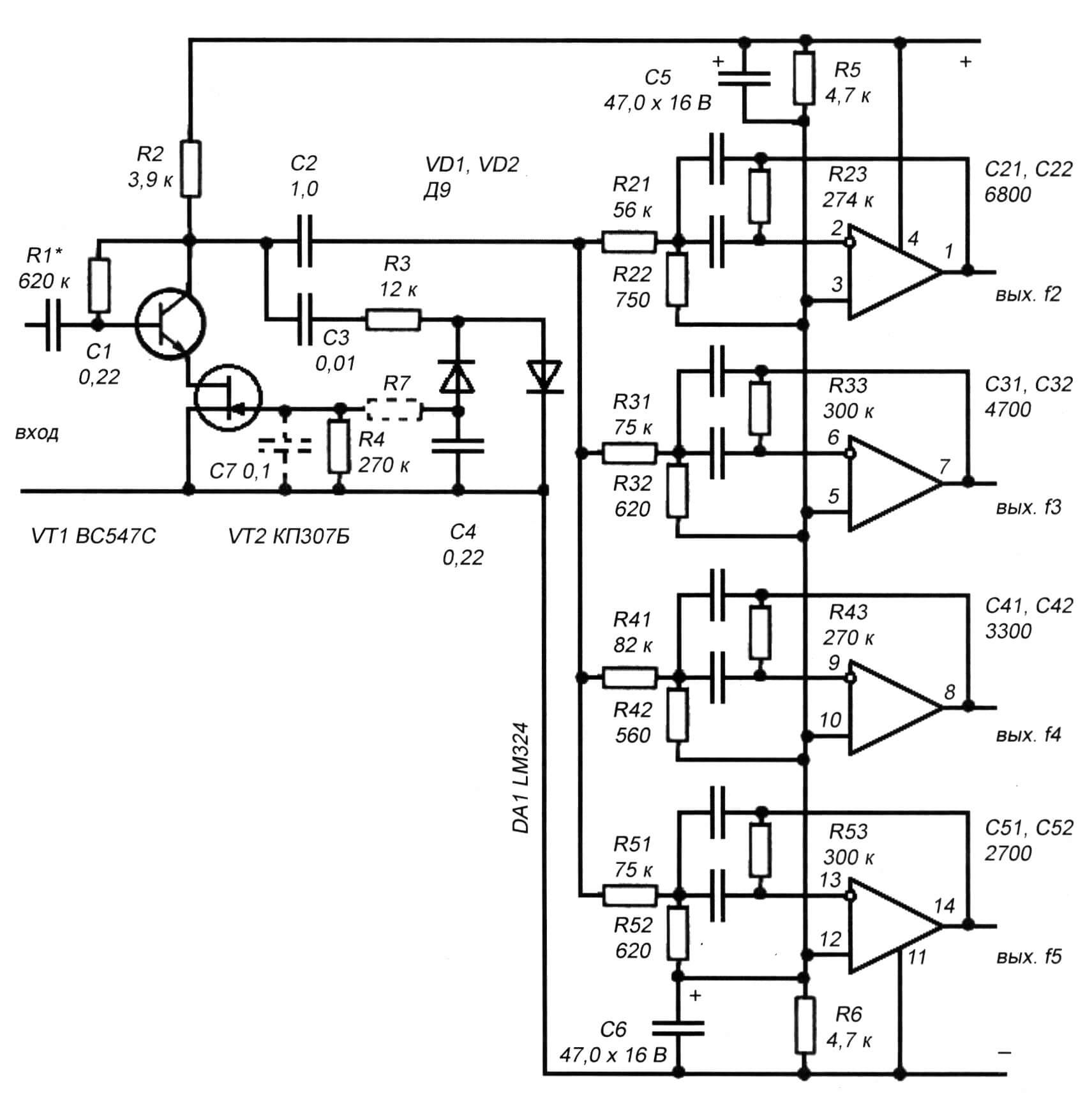 Рис. 2 Принципиальная схема модуля дешифратора ДР4
Рис. 2 Принципиальная схема модуля дешифратора ДР4
Входной сигнал поступает на предварительный усилитель на VT1, а затем на фильтры и выпрямитель на VD1, VD2. Система АРУ на VT2 стабилизирует уровень сигнала на входах фильтров в широком диапазоне входных напряжений (от 20 мВ до нескольких вольт).
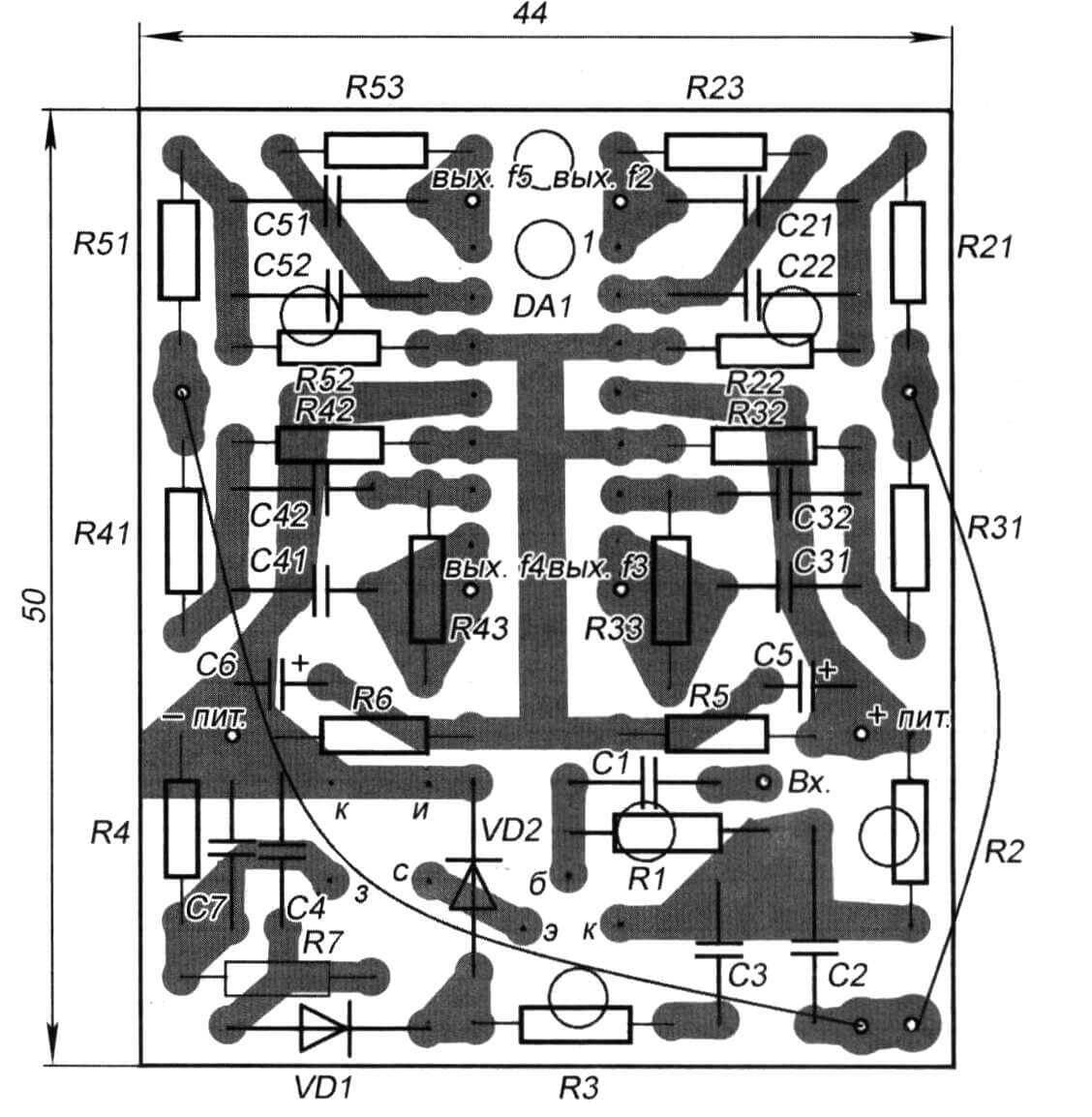 Рис. 3 Печатная плата дешифратора ДР4
Рис. 3 Печатная плата дешифратора ДР4
Фильтры выполнены на счетверенном операционном усилителе LM324. Для обеспечения работы ОУ создана искусственная средняя точка питания цепочкой R5, R6, С5, С6. Это решение повышает стабильность, защищает от помех, вызванных работой моторов, и позволяет использовать дешифратор в системах с однополярным питанием.
Детали и налаживание
В качестве VT1 можно использовать транзисторы КТ3102 (Б-Е). VT2 — полевой транзистор с n-каналом, с начальным током стока не менее 1,5 мА и напряжением отсечки до 2 В. Диоды АРУ — германиевые (Д9, ГД507).
Налаживание ведется при напряжении питания 7,5 В. Подбором R1 добиваются, чтобы напряжение на коллекторе VT1 было примерно половиной напряжения питания.
Настройка фильтров сводится к подбору резисторов для получения нужных резонансных частот. Уменьшение резистора увеличивает частоту, увеличение — уменьшает. Если нет измерительных приборов, можно настроить генераторы шифратора под фактические частоты фильтров.
| Резистор | Расчетное значение | Фактическое |
| R21 | 58,5к | 56к |
| R22 | 741 | 750 |
| R23 | 292к | 274,7к (270к+4,7к) |
| R31 | 71,6к | 75к |
| R32 | 597 | 620 |
| R33 | 287к | 300к |
| R41 | 84,3к | 82к |
| R42 | 597 | 560 |
| R43 | 287к | 270к |
| R51 | 75,4к | 75к |
| R52 | 628 | 620 |
| R53 | 302к | 300к |
Модуль усилителя рулевых машинок (УРМ)
Сигналы с пар фильтров поступают на модули УРМ. Входные транзисторы работают без начального смещения, что создает зону нечувствительности для слабых сигналов соседних каналов и помех. Управляющее напряжение формируется на конденсаторах С5 и С6.
 Рис. 4. Принципиальная схема модуля УРМ
Рис. 4. Принципиальная схема модуля УРМ
Принцип работы с обратной связью: управляющее напряжение открывает соответствующий мощный транзистор, мотор рулевой машинки начинает движение и одновременно перемещает движок потенциометра обратной связи. Возникающее компенсирующее напряжение сравнивается с управляющим. Когда они уравниваются, мотор останавливается. Таким образом, входное напряжение определяет положение рулей. Эту же схему можно использовать для плавного управления ходовыми моторами, просто отключив цепь обратной связи.
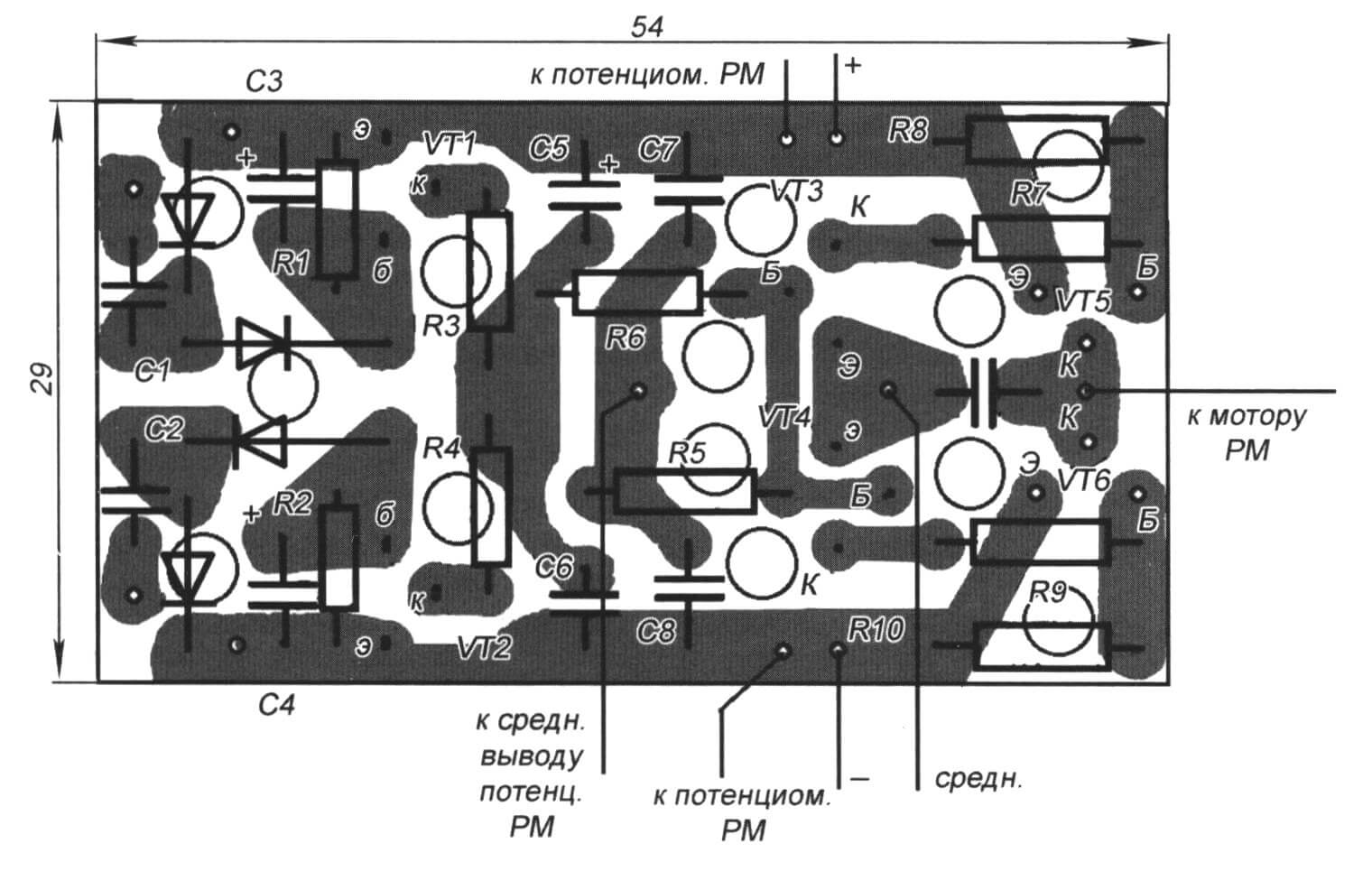 Рис. 5. Печатная плата модуля УРМ
Рис. 5. Печатная плата модуля УРМ
Мощные транзисторы BD136/BD138 можно заменить на КТ814/КТ815. Для управления можно использовать машинку от системы «Новопроп» или современную аналоговую, удалив в последней штатную плату.
Платы облегчены множеством отверстий диаметром 3,2 мм, что экономит материал, улучшает охлаждение и снижает паразитные емкости.
Налаживание УРМ для рулевых машинок сводится к проверке правильности полярности подключения мотора и потенциометра обратной связи с помощью дополнительного переменного резистора.
Рис. 6. Блок-схема приемной части
Повышение мощности ходовых моторов
Поскольку система подает на моторы напряжение только одного плеча питания, для увеличения мощности хода вперед можно использовать реле. При достаточном напряжении на выходе транзистора VT6 реле сработает и подключит второй вывод мотора к положительному полюсу, подав на него суммарное напряжение обеих батарей.
Рис. 7. Схема увеличения мощности ходовых моторов
Передающая часть (шифратор)
Вместо генераторов прямоугольных импульсов, которые создают много гармоник, в системе используются генераторы, близкие к синусоидальным, и аналоговый коммутатор, сохраняющий форму сигнала.
Ориентировочные значения емкостей в генераторах сигналов (ГС):
| № частоты | Частота, кГц | С1,С3 | С2 |
| 2 | 1,6 | 3300 | 0,022 |
| 3 | 2,9 | 2700 | 0,01 |
| 4 | 3,6 | 2200 | 0,01 |
| 5 | 4,3 | 2000 | 7500 |
Рис. 10. Принципиальная схема шифратора
Шифратор содержит задающий мультивибратор на D1 и счетчик D2, которые последовательно опрашивают каналы. Коммутатор на D3 (CD4066 или К561КТ3) включает нужный тон. Выходные транзисторы модулей мультивибраторов (МВ) совместно с диодами VD1-VD4 образуют логические элементы «И». Для стабильности на плате установлен стабилизатор напряжения 5 В (DA1).
Рис. 11. Печатная плата шифратора
Платы модулей ГС устанавливаются вертикально на основную плату. Один логический элемент микросхемы D1 не используется, его входы закорочены на общий провод для защиты.
Радиоканал
Для радиосвязи можно использовать сверхрегенеративный приемник.
Рис. 13 Принципиальная схема приемника
Катушка L1 содержит 8,5 витков провода ~0,23 мм на каркасе 7 мм с подстроечным сердечником. Дроссель — 85 витков провода 0,14 мм на резисторе МЛТ-0,5 >500 кОм.
Рис. 14. Печатная плата приемника
Настройка приемника заключается в настройке контура L1 на частоту передатчика и регулировке режима сверхрегенерации подстроечным конденсатором С5 по максимуму чистого сигнала (без шипения). Передатчик может быть любым, способным работать в модельном диапазоне (27-28 МГц), его нужно лишь подключить к выходу шифратора.
Окончательная настройка и подавление помех
Генераторы ГС настраиваются по частотомеру на частоты фильтров дешифратора. Если прибора нет, можно настроить их по максимуму сигнала на выходе соответствующего фильтра, используя тестер.
Для компенсации неполного диапазона перемещения рулевой машинки, крайние выводы ее потенциометра подключаются к шинам питания через резисторы в несколько сотен Ом (например, 430 Ом).
Из-за низкой частоты канал А работает менее точно, поэтому для авто- или судомоделей рули лучше подключать к каналу Б, а ходовые моторы — к каналу А.
Меры по подавлению помех (особенно важно для радиочастотного канала):
- На борту модели установить конденсаторы ≥100 мкФ между средней точкой питания и обоими полюсами.
- Включить электромоторы через дроссели (50-60 витков провода ≥0,23 мм на резисторе МЛТ-0,5).
- Подключить к выводам моторов конденсаторы ≥0,033 мкФ.
- Использовать экранированный или витой провод от приемника к дешифратору.
- В пульте управления днище и дальняя стенка должны быть металлическими и заземленными. Передатчик лучше вынести в отдельный корпус.
Рис. 15. Принципиальная схема индукционного передатчика
Система «Каната» представляет собой гибкую, ремонтопригодную и помехоустойчивую аналоговую тональную систему радиоуправления, которую можно адаптировать под различные задачи моделиста.
(Продолжение следует)
А. ЛИСОВ